1.引言
图像在捕获、传输、处理等过程中会由于噪声的影响而使画质失真,消除噪声是图像预处理的一项重要任务。目前已有许多种图像滤波技术,典型的方法是根据邻域内像素的加权平均值对像素的值进行调整。由于彩色图像每个像素点的值是一个彩色向量,故在彩色图像处理中,基于向量处理的滤波方法是一类有效、可行的重要方法,如将一个移动窗口中的向量排序后其末尾向量作为输出的有序向量法;利用两个彩色向量间的角度作为排序基准的向量方向滤波器;对向量的方向和幅值分别进行处理后再合并的混合方向滤波器;以及输入输出关系用有理函数进行表示的向量有理滤波器。对于受噪声污染的像素,这些滤波器能够较好的检出并进行有效处理,但却不能很好地保持未受噪声破坏的像素的特性。另一方面,模糊技术已广泛应用于图像处理领域。
在图像滤波方面,Lee等提出了一种加权模糊均值滤波器,即任意像素的值由其所在窗口内像素的加权均值所代替,权重由存放在知识库中的隶属度值确定,知识库由专家给出或通过参考图像的直方图确定,这种方法能够有效剔除脉冲噪声。Choi等设计了三种不同功能的滤波器,作为规则后件相应于不同情况(规则前件)下的输出口。而Law等则利用高斯滤波器对图像进行平滑,高斯滤波器的参数由模糊推理确定。此外,当一个像素点与邻域像素的属性值差异较大时,则该像素点或是边缘点,或是噪声点,Vail de Ville等利用模糊逻辑对此进行处理,通过迭代滤波的方法消除噪声,并利用滤波后的方差自适应地调整隶属度函数的参数。
对于一个性能好的滤波器,要求既要有效抑制噪声,又要保持边缘和细节信息的完整性。然而在一些常规的滤波方法中,一些好的细节信息往往被误认为噪声而进行处理,导致图像的细节信息受到破坏。这种问题就属于噪声和好的细节信息间的模糊性或不确定性问题,而模糊逻辑是处理不确定性问题的一种有效方法。为此,可以采用一种基于模糊逻辑的彩色图像滤波方法,利用一个像素与邻域像素的接近程度作为其属于该局部区域的程度,以此对图像进行模糊化.模糊化后图像的隶属度值可用于判断一个像素点是噪声点还是好的细节点,不同情况下模糊规则有不同的输出,对模糊推理获得的隶属度进行反变换可以获得滤波后的图像。对彩色图像,三个分量分别以同样的方法进行处理即可。
2.图像滤波算法分类
目前常用的图像滤波算法很多,大体上可分为基于图像域的滤波算法和基于变换域的滤波算法。前者是直接在图像空间中进行的处理,而后者是闷接地在图像的变换域中进行的处理。空域滤波是在图像空间借助模板进行邻域操作完成的,根据特点一般可以分为线性滤波和非线性滤波两大类。线性滤波就是用滤波窗口中各象素灰度值的线性变换来代替被处理象素的灰度值,其滤波窗口大小为:
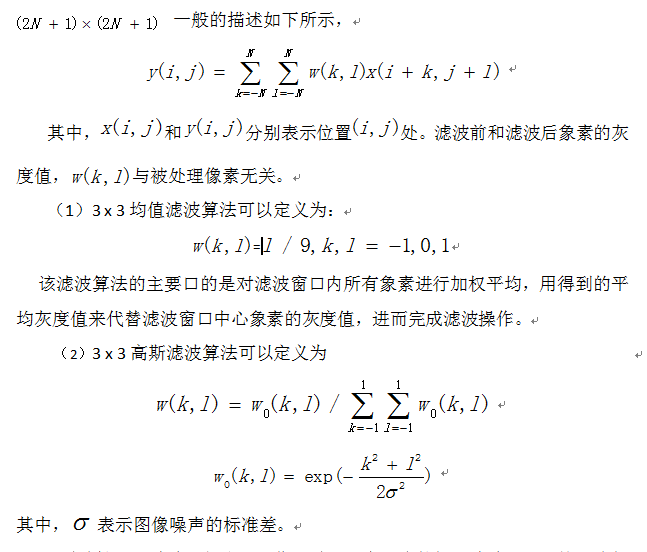
经过线性平滑滤波,相当于图像经过了一个二维的低通滤波器,虽然是降低了噪声,但同时也模糊了图像的边缘和细节,这是这类滤波算法存在的通病。非线性滤波算法克服了线性滤波算法的不足,可以有效地消除一些孤立的噪声点并且具有很好的图像细节信息保护能力。非线性滤波算法的种类繁多,很难对它进行概括性的数学描述。从数学角度看,非线性滤波是采用微分、积分、多项式运算、坐标变换等方法对图像进行某种形式的处理,具有方法直观、制作简便等优点:但当要处理较大的数字图像数据时,由于图像阵列很大,如果没有发现比较高效的算法,计算上会变得很烦琐,存在着滤波的广度和构成方式的模糊,计算时问长,预测性差等缺点,这样就会降低其在现实工作中的使用价值。
同样情况下如果采用图像变换的方法,如傅里叶算法、沃尔什算法等间接处理技术,就可以获得更为有效的处理方法。所谓的图像频谱变换则是将图像从空间域线性傅里叶变换到频谱域,监测和研究图像的频谱特性,并且进行滤波处理,最终将处理后的频谱经过傅里叶逆变换恢复图像到空间域。虽然,非线性滤波算法对线性滤波算法的缺点进行了一定的改善,然而,仍然很难在抑制噪声和保护细节信息这一对固有的矛盾之问得到较好的折衷。
3.基于模糊理论的图像滤波方法
自从1965年美国加里福尼亚大学控制论专家L A.Zadeh教授提出模糊数学以来,模期技术被广泛地应用于番个领域。近几年柬,模糊技术已经成功地应用于非线性滤波领域,提出了很多针对图像滤波的模糊算法。基于模糊推理的图像滤波算法允许人们将模糊规则与传统的精确算法相结合,因而具有运算简单、设计灵活、鲁棒性强等特点。并且能够在抑制噪声和保护细节信息这一对固有的矛盾之间得到较好的折衷。正因为模糊滤波算法拥有这些优点,所以得到学者们越来越多的关注,发展的速度也越来越快。
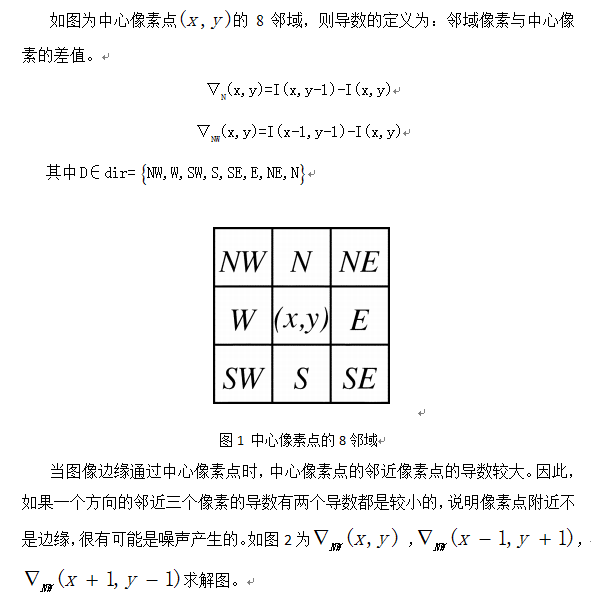
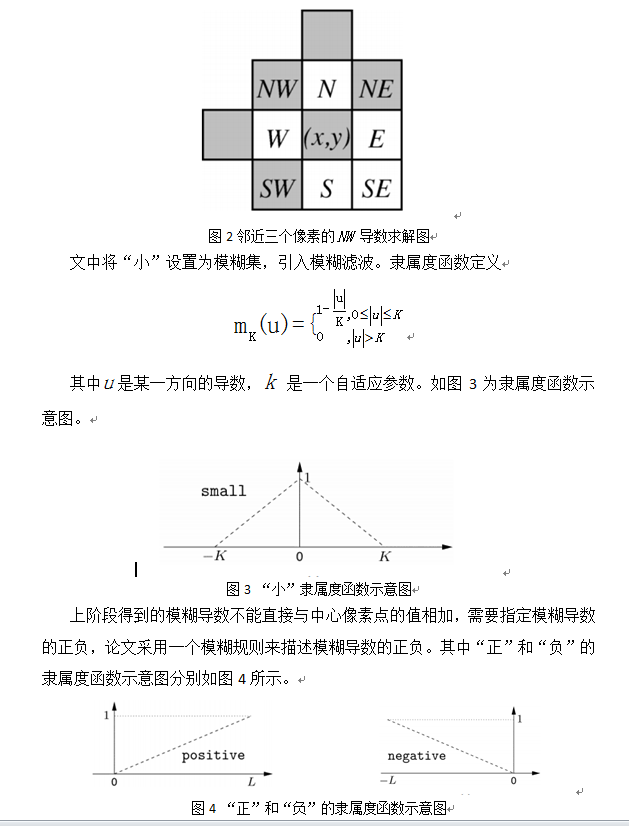
Dimitri Van De Ville在IEEE TRANSACTIONS ON FUZZY SYSTEMS发布了一篇名为Noise Reduction by Fuzzy Image Filtering的图像模糊滤波去噪论文,取得了较好的处理效果,论文主要工作包括:计算中心像素点的8个方向的模糊导数;根据模糊导数的值来加权8邻域的像素值得到偏置 ;将得到的 与中心像素点的值相加。


)